នាពេលបច្ចុប្បន្ននេះភាគច្រើននៃ actuators នៅលើទីផ្សារមានពីរប្រភេទនៃវិធីសាស្រ្តគ្រប់គ្រងកម្លាំង:
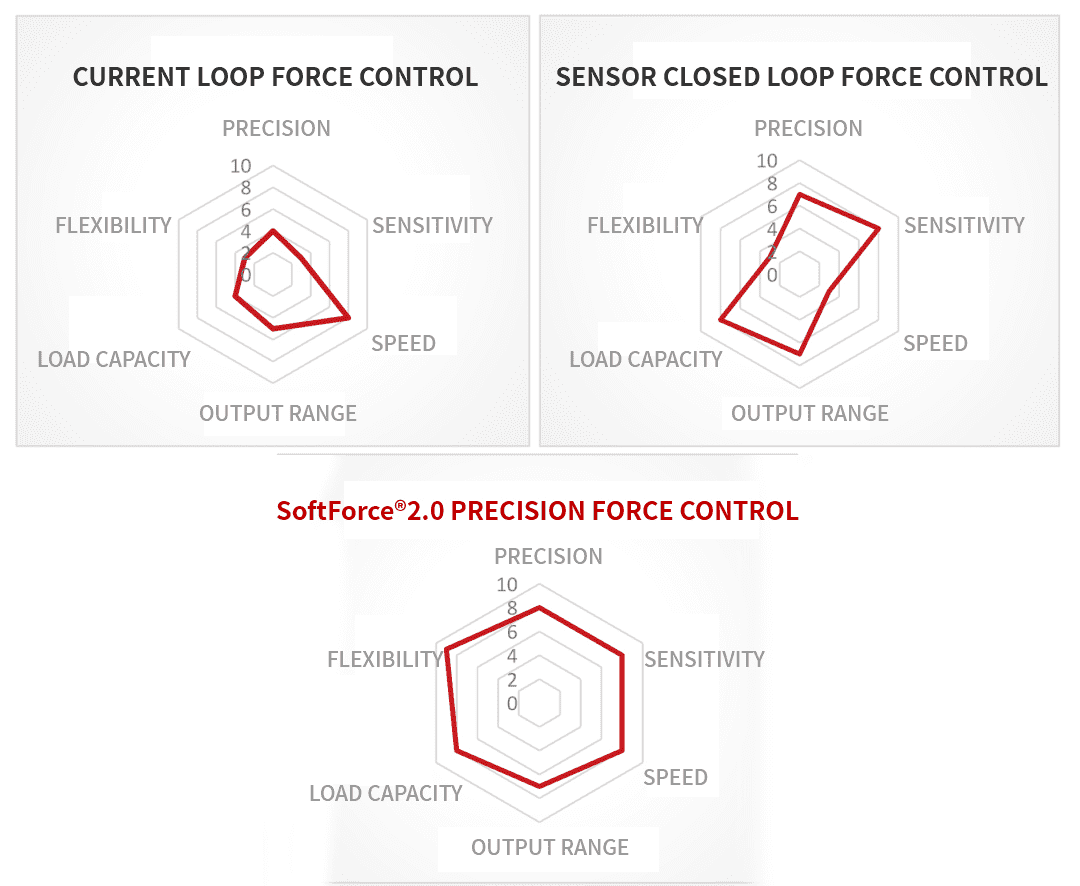
1. ការត្រួតពិនិត្យកម្លាំងរង្វិលជុំបច្ចុប្បន្ន
វិធីសាស្ត្រគ្រប់គ្រងកម្លាំងសាមញ្ញដែលងាយស្រួលអនុវត្ត ដែលដឹងពីការគ្រប់គ្រងកម្លាំងដោយការកែតម្រូវចរន្តខាងក្នុងរបស់ម៉ូទ័រ។អត្ថប្រយោជន៍គឺថាវាមិនសូវពិបាកក្នុងការអនុវត្តទេ ហើយវាអាចសម្រេចបាននូវការគ្រប់គ្រងដោយកម្លាំងក្នុងចន្លោះពី 5% ទៅ 15% ភាពត្រឹមត្រូវ។គុណវិបត្តិគឺថាល្បឿននៃចលនាយឺត វាមិនអាចបើកបរបញ្ច្រាស់បានទេ ហើយវាមិនអាចបំពេញតម្រូវការនៃសេណារីយ៉ូមួយចំនួនដែលមានតម្រូវការភាពជាក់លាក់ខ្ពស់នោះទេ។បន្ទាប់ពីរយៈពេលនៃការប្រើប្រាស់ការពាក់មេកានិចនឹងនាំមកនូវកំហុសនិងកាត់បន្ថយភាពត្រឹមត្រូវបន្ថែមទៀត។
ឧបករណ៍ចាប់សញ្ញាបែបនេះជាធម្មតាមិនមានឧបករណ៍ចាប់សញ្ញាទេ ហើយទោះបីជាមានឧបករណ៍ចាប់សញ្ញាក៏ដោយ ពួកវាត្រូវបានប្រើតែជា "ការបង្ហាញ" នៃកម្លាំង និងមិនចូលរួមក្នុងការគ្រប់គ្រង។ឧទាហរណ៍ ការបន្ថែមឧបករណ៍ចាប់សញ្ញាទៅសារពត៌មាន ឧបករណ៏អានទំហំនៃកម្លាំង និងបង្ហាញតម្លៃតាមរយៈម៉ែត្រ ដែលត្រូវបានប្រើដើម្បីជួយសម្រួលដល់ការកែតម្រូវទំហំកម្លាំងដោយដៃ ប៉ុន្តែការកែតម្រូវបែបនេះជាទូទៅមិនមានអ្វីដែលត្រូវធ្វើនោះទេ។ ជាមួយនឹងភាពត្រឹមត្រូវនៃកម្លាំង។

ដ្យាក្រាមគំនូសតាង មិនទាក់ទងនឹងក្រាហ្វិក និងអត្ថបទ
2. ឧបករណ៍ចាប់សញ្ញា ការត្រួតពិនិត្យកម្លាំងរង្វិលជុំ
វិធីសាស្ត្រគ្រប់គ្រងកម្លាំងមួយទៀតគឺត្រូវបន្ថែមឧបករណ៏កម្លាំងធម្មតា និងក្បួនដោះស្រាយការគ្រប់គ្រងរង្វិលជុំបិទធម្មតា។គុណសម្បត្តិគឺថាភាពត្រឹមត្រូវត្រូវបានធ្វើឱ្យប្រសើរឡើងប៉ុន្តែគុណវិបត្តិគឺល្បឿននៅតែយឺត។តាមរបៀបនេះ ភាពត្រឹមត្រូវនៃការគ្រប់គ្រងកម្លាំងអាចកើនឡើងពី 5% ទៅ 1%។ប្រសិនបើមិនមានដំណើរការក្បួនដោះស្រាយត្រឹមត្រូវ ឬល្បឿនរបស់ឧបករណ៍ចាប់សញ្ញាមិនលឿនគ្រប់គ្រាន់ទេ វាងាយនឹង "ជ្រុល" ។
ភ្នាក់ងារគ្រប់គ្រងដោយបង្ខំ
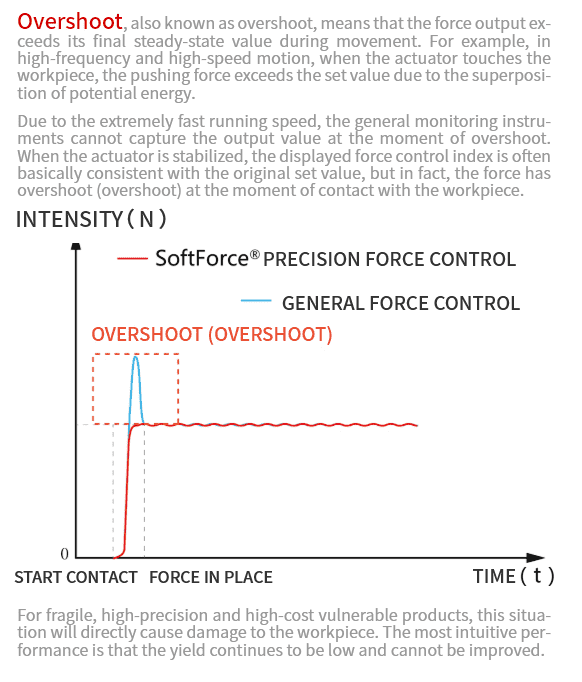
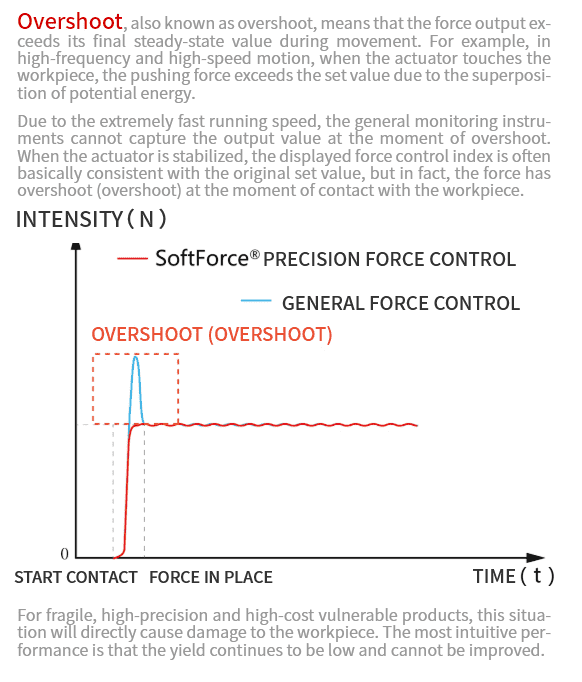
"ការហួសប្រមាណ" ដែលមិនអាចជៀសបាន?
វិធីសាស្រ្តគ្រប់គ្រងកម្លាំងបិទជិតរបស់ឧបករណ៍ចាប់សញ្ញាគឺពិបាកក្នុងការដោះស្រាយជាមួយនឹងកម្លាំងផលប៉ះពាល់។ការបង្ហាញដោយផ្ទាល់បំផុតគឺថា "ការបាញ់ប្រហារ" គឺងាយស្រួលណាស់ក្នុងការកើតឡើងនៅពេលដោះស្រាយឈុតឆាកជាមួយនឹងតម្រូវការសីតុណ្ហភាពខ្ពស់។
ឧទាហរណ៍
ជាទូទៅនៅក្នុងករណីនៃល្បឿនលឿននិងទិន្នផលធំ, ពេលដែល actuator ទាក់ទង workpiece ជាញឹកញាប់មានទំហំធំជាពិសេស។ឧទាហរណ៍ ប្រសិនបើកម្លាំងរុញរបស់ actuator ត្រូវបានកំណត់ទៅ 10N វាងាយស្រួលក្នុងការឈានដល់ 11N និង 12N នៅពេលដែលវាប៉ះនឹង workpiece ហើយបន្ទាប់មកវាត្រូវបានហៅត្រលប់ទៅ 10N តាមរយៈក្បួនដោះស្រាយគ្រប់គ្រង។បញ្ហាបែបនេះជារឿយៗកើតឡើងនៅពេលដែលឧបករណ៍ចាប់សញ្ញាកម្លាំង និងអ្វីដែលគេហៅថាឧបករណ៍បញ្ជាដោយកម្លាំងត្រូវបានបញ្ចូលទៅក្នុងទីផ្សារ។
នេះគឺជាបញ្ហាដែលល្បឿនឆ្លើយតបមិនលឿនគ្រប់គ្រាន់។ល្បឿនខ្ពស់ និងទិន្នផលច្បាស់លាស់ និងស្ថិរភាពគឺជាគូនៃភាពផ្ទុយគ្នានៅក្នុងខ្លួនពួកគេ។បើមានការជ្រុលហួសហេតុ (overshoot) កម្លាំងពិតប្រាកដនៅនឹងកន្លែងគឺគ្មានន័យទេ។
ជាពិសេសនៅក្នុងដំណើរការគ្រឿងបរិក្ខារដែលមានភាពជាក់លាក់នៃការផ្គុំសម្ពាធ ផ្នែកដែលផុយស្រួយ និងមានតម្លៃខ្ពស់ ជាទូទៅមិនត្រូវបានអនុញ្ញាតទេ។
ការគ្រប់គ្រងកម្លាំងពេញលេញ ប្រេកង់ខ្ពស់ និងល្បឿនលឿនដោយមិនមានការជ្រុល?
តើ TA ធ្វើវាដោយរបៀបណា?
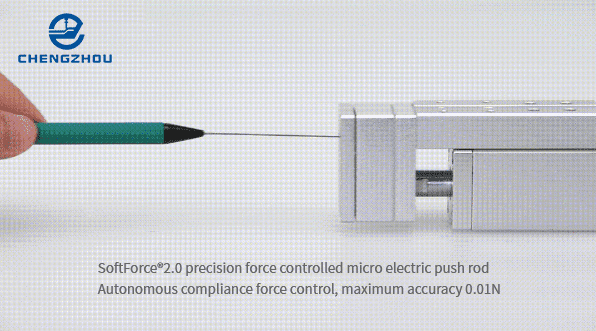
សម្រាប់សេណារីយ៉ូនៃកម្មវិធីដែលមានភាពជាក់លាក់ខ្ពស់ វិធីសាស្ត្រ "ចុះចតទន់" ត្រូវបានអនុម័តដោយគិតគូរពីតម្រូវការនៃល្បឿនខ្ពស់ និងភាពជាក់លាក់ខ្ពស់ ពោលគឺការគ្រប់គ្រងកម្លាំងដោយផ្នែក។actuator ចូលទៅជិត workpiece យ៉ាងលឿនតាមរយៈរបៀបចលនាទីតាំង ប្តូរយ៉ាងលឿនទៅរបៀបគ្រប់គ្រងកម្លាំងនៅទីតាំងដែលវាហៀបនឹងទាក់ទង workpiece ហើយបង្កើនទិន្នផលបន្តិចម្តងៗរហូតដល់វាឈានដល់តម្លៃកំណត់ជាមុន។របៀបទីតាំង + របៀបគ្រប់គ្រងកម្លាំង + ពេលវេលាស្ថេរភាពកម្លាំង ពេលវេលាសរុបដែលបានប្រើគឺជាប្រសិទ្ធភាពនៃការប្រតិបត្តិតែមួយរបស់ actuator ។
រួមបញ្ចូលគ្នាជាមួយឧបករណ៍ចាប់សញ្ញាកម្លាំងល្បឿនលឿន និងក្បួនដោះស្រាយការព្យាករណ៍ផ្អែកលើគំរូ SoftForce®2.0 actuator ដែលគ្រប់គ្រងដោយកម្លាំងជាក់លាក់អាចកំណត់អត្តសញ្ញាណទីតាំងរបស់ actuator និងស្ថានភាពទំនាក់ទំនងដោយស្វ័យប្រវត្តិជាមួយនឹង workpiece ដូច្នេះ actuator ដែលជាចុងបញ្ចប់នៃស្វ័យប្រវត្តិកម្ម។ ឧបករណ៍, មានមុខងារដូចគ្នានឹងដៃមនុស្ស។ការយល់ឃើញ tactile, ការត្រួតពិនិត្យនិងការប្រតិបត្តិបញ្ញា។
នៅចម្ងាយដូចគ្នា ជួរល្បឿនចុះចតទន់នៃ "SoftForce ®2.0 Precision Force Control" ត្រូវបានកើនឡើង ភាពអត់ធ្មត់កាន់តែធំ ហើយវាថែមទាំងអាចសម្រេចបាននូវការគ្រប់គ្រងកម្លាំងពេញលេញ ដែលធ្វើអោយប្រសើរឡើងនូវវដ្តផលិតកម្មដោយផ្ទាល់ និងកាត់បន្ថយការចំណាយនៃការសាកល្បង និង ការផ្ទៀងផ្ទាត់កំហុស។
▋ប្រេកង់ដំណើរការខ្ពស់ ដើម្បីសម្រេចបាននូវដំណើរការកាន់តែប្រសើរ
វដ្តនៃការគណនានៃ "ឧបករណ៏កម្លាំងប្រាំមួយអ័ក្ស + មនុស្សយន្ត" ដែលប្រើជាទូទៅនៅលើទីផ្សារគឺ 5-10 មិល្លីវិនាទី ពោលគឺប្រេកង់ដំណើរការគឺ 100-200 ហឺត។ប្រេកង់ដំណើរការនៃ SoftForce®2.0 actuators គ្រប់គ្រងដោយកម្លាំងភាពជាក់លាក់អាចឈានដល់ 4000Hz (ពោលគឺ 0.25 មិល្លីវិនាទី) ហើយម៉ូដែលស៊េរីប្រេកង់ខ្ពស់អាចឈានដល់ 8000Hz ដែលជា 4-8 ដងនៃប្រេកង់ដំណើរការនៃ actuators ដែលគ្រប់គ្រងដោយមនុស្សយន្តទូទៅ។
▋ ការត្រួតពិនិត្យកម្លាំងអនុលោមភាពសកម្ម ដែលអាចធ្វើតាមការផ្លាស់ប្តូរនៃកម្លាំងខាងក្រៅ
អត្រាឆ្លើយតបប្រកបដោយប្រសិទ្ធភាព និងមតិត្រឡប់ពីកម្លាំងភ្លាមៗអាចឱ្យ actuator ឆ្លើយតបភ្លាមៗចំពោះកម្លាំងខាងក្រៅ និងសម្រេចបាននូវការគ្រប់គ្រងកម្លាំងដែលអនុលោមតាមសកម្មភាព។ទោះបីជាកម្លាំងខាងក្រៅត្រូវបានជួបប្រទះក្នុងអំឡុងពេលប្រតិបត្តិការក៏ដោយក៏វាអាចត្រូវបានកែតម្រូវទាន់ពេលវេលាដែលធ្វើឱ្យដំណើរការកាន់តែច្បាស់លាស់។ការការពារកាន់តែប្រសើរឡើងនៃ workpieces ។
ប្រេកង់ខ្ពស់និងល្បឿនលឿនដោយមិនមានការជ្រុល
សូម្បីតែនៅក្រោមចលនាប្រេកង់ខ្ពស់ និងល្បឿនលឿនក៏ដោយ ក៏វានៅតែរក្សាបាននូវភាពត្រឹមត្រូវនៃទិន្នផលខ្ពស់ ហើយក្នុងពេលជាមួយគ្នានេះធានានូវ "ការចុះចតទន់" និង "មិនហៀរ" ទាក់ទងផ្ទៃនៃផ្នែកដែលមានល្បឿនលឿន កម្លាំងតូច និងអាចបត់បែនបាន។ ការជ្រើសរើស និងការដាក់ផ្នែកជាដើម ដើម្បីជៀសវាងការខូចខាតដល់ផ្នែកដែលឆ្ងាញ់ និងផុយស្រួយ។សមាសធាតុ។
ការគ្រប់គ្រងកម្លាំងភាពជាក់លាក់ SoftForce®2.0
ស៊េរី HF ធ្វើឱ្យប្រសើរឡើងថ្មី។
▋ សមត្ថភាពប្រឆាំងនឹងការផ្ទុកលើសទម្ងន់
ដោយផ្អែកលើការយល់ដឹងស៊ីជម្រៅនៃដំណើរការនៅនឹងកន្លែង និងការកើតឡើងដដែលៗជាច្រើន ស៊េរី HF SoftForce® 2.0 ដែលត្រូវបានធ្វើឱ្យប្រសើរឡើងថ្មីរបស់ Chengzhou នៅក្នុងខែកុម្ភៈឆ្នាំនេះ មានការរចនាឧបករណ៍ចាប់សញ្ញារួមបញ្ចូលគ្នា ហើយសមត្ថភាពប្រឆាំងនឹងការផ្ទុកលើសទម្ងន់របស់វាខ្ពស់ជាងច្រើនដង។ អតីតកាល ជាមួយនឹងភាពធន់ខ្ពស់ និងភាពងាយស្រួលនៃការប្រើប្រាស់។ទប់ទល់នឹងលក្ខខណ្ឌស្មុគស្មាញជាង។
▋អាចគិតទាំងកម្លាំងតូច និងទិន្នផលធំ
បំពាក់ដោយប្រព័ន្ធគ្រប់គ្រងកម្លាំងដែលមានភាពជាក់លាក់ខ្ពស់ SoftForce®2.0 តារាងស្លាយដែលគ្រប់គ្រងដោយកម្លាំងជាក់លាក់ និងដំបងរុញជាមួយនឹងការដាច់សរសៃឈាមខួរក្បាលធំ និងបន្ទុកធំអាចបង្កើតកម្លាំងតូច និងច្បាស់លាស់នៅក្រោមបន្ទុកខ្ពស់ ហើយក៏អាចគិតគូរពីកម្លាំងដូចគ្នាផងដែរ។ ពេលវេលា និងជួរទិន្នផលកាន់តែធំ។ធំជាង ពោលគឺជួរថាមវន្តកម្លាំងកាន់តែទូលំទូលាយ*។
*Force Dynamic Range៖ សមាមាត្ររវាងកម្លាំងអតិបរមា និងអប្បបរមាដែលអាចបញ្ចេញបាន។
ការគ្រប់គ្រងកម្លាំងជាក់លាក់អាចប្រើបានតែលើអ័ក្សតែមួយប៉ុណ្ណោះ។
SoftForce®2.0 actuators គ្រប់គ្រងដោយកម្លាំងជាក់លាក់ មិនត្រឹមតែអាចប្រើក្នុងអ័ក្សតែមួយប៉ុណ្ណោះទេ ប៉ុន្តែថែមទាំងផ្តល់នូវលទ្ធភាពកាន់តែច្រើនសម្រាប់ដំណោះស្រាយការផ្គុំពហុអ័ក្សផងដែរ។ជាឧទាហរណ៍ ប្រព័ន្ធគ្រប់គ្រងវេទិកាបង្ខំភាពជាក់លាក់ RM Chengzhou 2D ចុងក្រោយបង្អស់ដែលត្រូវបានដាក់ឱ្យដំណើរការដោយបច្ចេកវិទ្យា Chengzhou ត្រូវបានផ្សំឡើងដោយឧបករណ៍អគ្គិសនីដែលគ្រប់គ្រងដោយកម្លាំងជាក់លាក់ Chengzhou ដែលអាចជំនួសកម្លាំងនៃ "ឧបករណ៍ចាប់សញ្ញាប្រាំមួយអ័ក្ស + មនុស្សយន្ត" គ្រោងការណ៍គ្រប់គ្រង។ ប្រើសម្រាប់ការកិនយ៉ាងច្បាស់លាស់ និងបំបាត់ការខូចខាតផ្នែកខាងក្នុងនៃទូរសព្ទដៃ។ល។
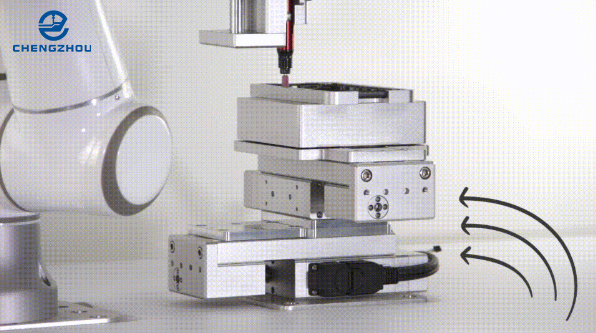
Chengzhou 2D synchronous force control platform system control system
(បំពាក់ដោយប្រព័ន្ធគ្រប់គ្រងកម្លាំងដែលមានភាពជាក់លាក់ខ្ពស់ SoftForce®2.0)
សេវាកម្មប្រកបដោយវិជ្ជាជីវៈទំនើប និងងាយស្រួលប្រើ
ក្បួនដោះស្រាយការគ្រប់គ្រងកម្រិតខ្ពស់ និងដំណើរការបំបាត់កំហុសសាមញ្ញនាំមកនូវបទពិសោធន៍អ្នកប្រើប្រាស់ដ៏ងាយស្រួលដល់អតិថិជន។សូម្បីតែប្រតិបត្តិករដែលមានផ្ទៃខាងក្រោយកម្រិតទាបអាចចាប់ផ្ដើមបានក្នុងរយៈពេល 5 នាទីដោយពិតជា "ដោតនិងលេង"។
ជាមួយគ្នានេះដែរ ក្រុមសេវាកម្មបច្ចេកទេសក្រោយពេលលក់ប្រកបដោយវិជ្ជាជីវៈ និងរឹងមាំរបស់ Chengzhou Technology អាចផ្តល់ជូនអតិថិជននូវជំនួយបច្ចេកទេសទាន់ពេលវេលា ទូលំទូលាយ និងគ្មានកង្វល់នៅក្នុងលើកដំបូង មិនថាជាការសង្ស័យបច្ចេកទេស ការបង្រៀន ការដោះស្រាយបញ្ហា ឬការថែទាំនោះទេ។
បច្ចេកវិទ្យា Chengzhou តែងតែមានភាពក្លាហានក្នុងការពង្រីកព្រំដែនរបស់ខ្លួន។ជាមួយនឹងកម្លាំងបច្ចេកទេសដ៏រឹងមាំ និងប្រកបដោយភាពច្នៃប្រឌិត វាបានដំណើរការជាបន្តបន្ទាប់នូវផលិតផល actuator ដែលមានភាពឆ្លាតវៃ ច្បាស់លាស់ជាងមុន និងត្រូវគ្នាបន្ថែមទៀត ដើម្បីផ្តល់នូវផលិតផលកម្រិតខ្ពស់សម្រាប់ការវេចខ្ចប់ និងការធ្វើតេស្ត semiconductor ស្វ័យប្រវត្តិកម្ម 3C ការផលិតភាពជាក់លាក់ វេជ្ជសាស្ត្រឆ្លាតវៃ និងឧស្សាហកម្មផ្សេងៗទៀត។សមាសធាតុស្នូលដូចជាប្រព័ន្ធគ្រប់គ្រងចលនាច្បាស់លាស់ និង actuators ។
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី៣១ ខែឧសភា ឆ្នាំ២០២២